BiRC Lab
Research
|
Many researchers have long dreamed of developing wearable systems that enhance individual abilities. Practical studies on such systems started from the early 2000s due to the technology development in design and control. Recently, various advanced wearable systems have featured microelectromechanical sensors, wireless networks, battery technologies, and so on. The wearable exoskeleton systems were developed for military use, daily life support, and rehabilitation. These wearable systems, however, feature rigid structures and actuators, which were usually employed in conventional robotics research. The design, manufacture, and control of such systems may be appropriate from the point of view of a ‘robot’, but have not been widely applied in practice because they are heavy, hard, and difficult to wear from the point of view of a ‘human’. Also, their performance and effectiveness are limited; again, the actuators and transmission systems are heavy and bulky. To overcome these issues, we have sought to develop innovative and practical wearable systems by comprehensive research with human-centered design and control of the wearable systems; the wearable systems are developed from the point of view of a ‘human’ not a ‘robot’. Also, structures and mechanisms used by animals and plants have informed the development of wearable human-robot interaction systems, creating the discipline of biomimetic robot research.
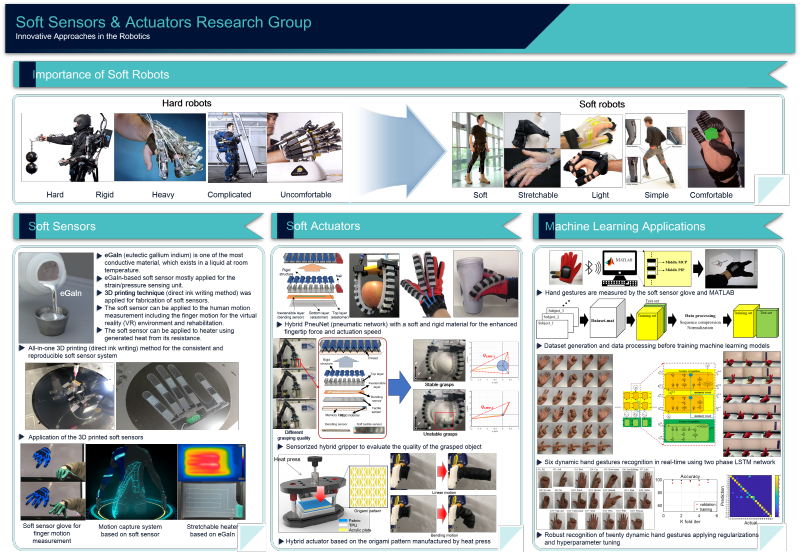
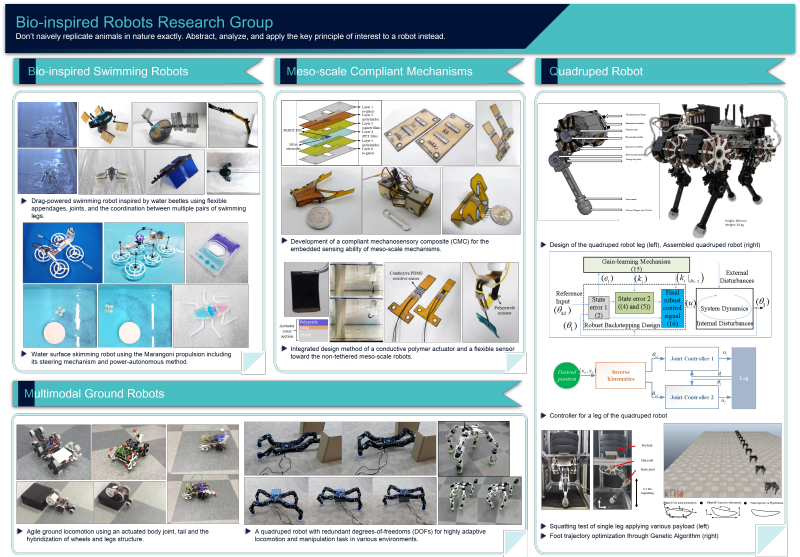
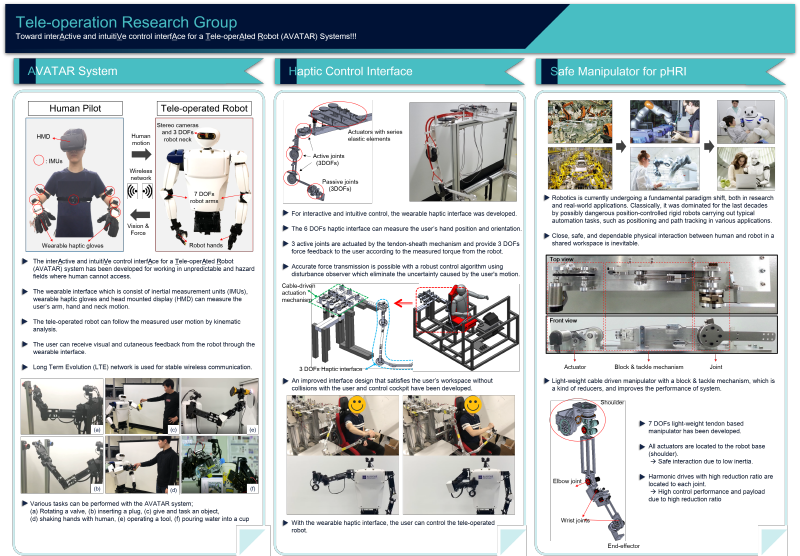
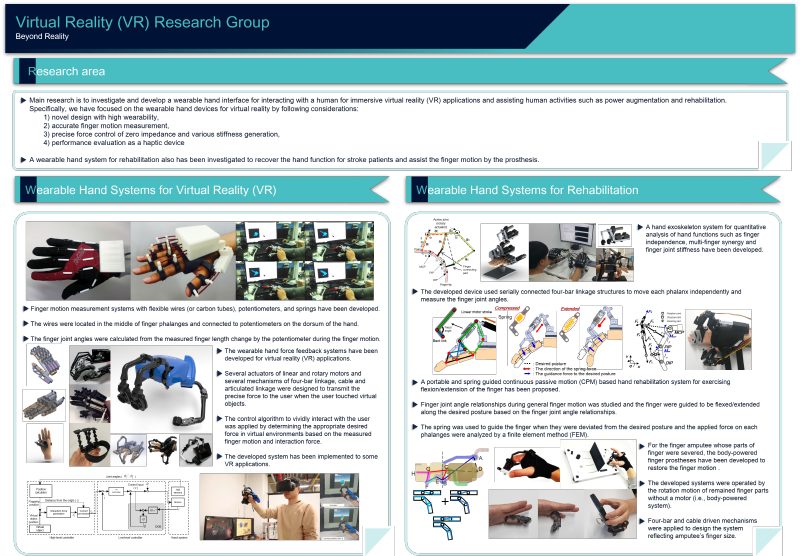
In Soft Sensors & Actuators Research Group, soft sensors using conductive liquid metal are researched, and motions of the human body are measured and analyzed using soft sensor. Also, hybrid actuators with pneumatic actuating systems and origami structures are studied. In addition, we are developing machine learning algorithms of body motions to interpret meaningful human movements. In Tele-operation Research Group, various force transmission mechanisms and control algorithms are researched for wearable human-robot interactions systems. The developed systems are practically utilized as a remote control interface, which is called an interActive and intuitiVe control interfAce for a Tele-operAted Robot (AVATAR) system. This system has been applied for remote controlled works as well as dismantling nuclear power plants. Wearable human-robot interaction systems for accurate force transmission have been applied for the human hands, which works as a primary interface for the interaction with external environment. In Virtual Reality Research Group, we develop a wearable system for the hand that can simultaneously measure 3D movement of all fingers and transmit accurate force to the fingers to realize a more immersive and realistic virtual reality. The developed structures and control algorithms have been also applied to wearable rehabilitation systems for stroke patients. The fundamental study about biological systems for the wearable human-robot interaction systems has been applied to analyze the mechanisms and structures of other animals and plants, which naturally lead us to the biomimetic robot research. In Bio-inspired Robots Research Group, biomimetic robot research is conducted mainly for more improved locomotion. For this purpose, we abstract, analyze, and apply the core principles of the creatures, not simply mimicking the mechanisms or structures to follow the same way. We are also conducting research on innovative manufacturing methods to implement such novel mechanisms and structures. |
Copyright © 2012~2020 Joonbum Bae (jbbae at unist dot ac dot kr). All Rights Reserved. Last update: Jan. 27, 2020